|
||
|
||
| ||
|
||
|
||
| ||
The CPU RightMark suite is meant for objective measurement of performance of modern and future processors in different computational tasks such as numerical modeling of physical processes and solving of 3D graphic problems. It focuses on testing the loaded FPU/SIMD units and the CPU/RAM tandem. As a result, we get pure CPU performance, an objective parameter obtained without the influence of other subsystems, like video and disc systems, except the memory one. It allows us to compare the true performance of different processors irrespective of a type of other system components. It's obtained by dealing only with the CPU and measuring the CPU time spent for execution of computational tasks. Thanks to high accuracy of measurements it takes less than one minute to obtain stable repeatable results. The current CPU RightMark version consists of two tests - CPU Performance and CPU Stability. 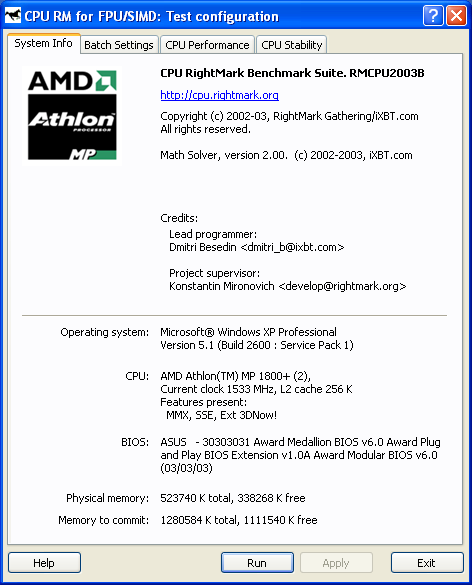 CPU PerformanceThe first test deals with both types of tasks - numeric modeling of physical processes and 3D graphics. The calculation of a system of particles is displayed as a beautiful scene that consists of multiple spheres. Therefore, the CPU Performance test can be divided into two independent modules running one after the other. 1. Numeric modelingThe first module (Solver) realizes numeric modeling of physical processes. Initialization of this module sets a number of the particles to be computed, their initial coordinates in the environment, their speeds and accelerations (as a rule, the latter is equal to 0 at the initial moment of time), their mass and radii, parameters of the interaction potential (lin_factor and quad_factor) and the factor of energy loss due to friction (v_factor).  Potential of particles' interaction The parameters depend on the model of interaction of particles selected in the test settings (see their description below). Solver estimates interaction of the particles at every step to get new acceleration values for every particle and then solves the classical motion equation.  Equations of motion of particles As a result, we get new speeds and coordinates of the particles, energy and momentum of the whole system, which are displayed as the test goes on. The procedure of estimation of the interaction and calculation of the motion equations repeats several times, and the number of iterations and dt (time step) can vary. The calculations in this module are carried out with double-precision variables. That is why Solver realizes three versions of the code optimization. The first uses x87 FPU, two others use SIMD extensions handling double-precision variables - SSE2 (available in Intel Pentium 4 and AMD Opteron/Athlon 64/FX) and SSE3 (in Intel Pentium 4 Prescott). The latter differs from SSE2 in a new operation of elementwise addition of components of the SSE2 register. Besides, every version of Solver intended for a certain instruction set realizes four versions of estimation of interaction of particles which differ in the number of manual code optimizations, and therefore, in performance. The CPU Performance test uses the highest-perfprmance version. 2. Scene renderingThe coordinates of the particles calculated by Solver go to the second module of CPU RightMark - Renderer. Initialization of this module is also very simple - it takes place when the test is run and the model type is selected. The constant parameters of spherical particles like their effective radius (which can differ from the actual radius), and the surface properties (diffuse and specular constants) are also selected at this moment. All other parameters - positions of particles, light sources and source colors - are selected anew for each frame, i.e. the can vary in time. So, Renderer also does very important job - it calculates and renders a dynamic scene that consists of multiple spheres. Since the CPU RightMark focuses on performance of exactly the CPU, not a video system, the rendering method must be appropriate. I.e. it must use only the CPU, and but at same time it mustn't be very slow and it's desirable that its image quality didn't yield to the standard rendering methods of 3D accelerators. The best method is this respect is the back ray tracing. The rendering procedure can be divided into two parts - preliminary scene analysis (prerendering) and ray tracing (rendering). At the prerendering stage the coordinates of particles (spheres) and light sources change relative the camera and direction of viewing. Then it clips off hidden spheres by checking if the sphere's center gets into the viewing pyramid (as a rule, in the realized models all spheres get into the viewing pyramid). The next stage is distribution of the sphere indices among the screen (projection) space fields - small squares called tiles. It cuts down the expenses for searching the primary ray crossing in the following rendering procedure. When the area is divided like that, the program doesn't need to calculate where all spheres are crossed for each screen pixel, it deals only with the spheres that hit a given tile. The last stage is the most complicated and CPU-intensive: calculation of lighting and shadowing of the spheres. An array of spheres is created for every light source according to its work range. After that the test checks each pair of spheres whether the first sphere can potentially shade the other, and vice versa. Then it creases a list of light sources for each sphere which can potentially light it, and a list of spheres which can shade a given light source (even partly) for each sphere/light source pair. Like partitioning of the screen area into tiles, this procedure cuts down the expenses for defining where the spheres are crossed by the secondary, or "shady", rays emitted from a given point of the visible sphere toward the light source. Now comes the second Renderer procedure - back ray tracing. Since all necessary data are obtained at the prerendering stage, the ray tracing procedure is pretty simple. It goes from one pixel to another, and if the tile with a given pixel is empty (no sphere indices) this pixel can be considered processed and can be shaded with a respective element of the sky texture (or left empty if sky shading is disabled). If a tile contains sphere indices it defines where the ray emitted from the camera to a given screen pixel crosses all spheres that hit this tile and then defines the nearest one. Actually, they may not cross (for example, if a sphere hits only the lower right-hand tile corner, while the test calculates it for the upper left-hand one) - in this case it shades sky or doesn't shade anything at all. If a sphere is crossed by the ray the program initiates a long procedure to determine the color of a given pixel. If the scene texturing is set, the program calculates spherical texture coordinates and fetches a texture element (which becomes a diffuse scattering constant for this pixel, Kd), and it also calculates the ambient light component (Ka). Then it checks whether this sphere is lighted by any light sources. A ray (L) is emitted from a given pixel of the sphere for every light source, and the program checks whether it crosses potential shading spheres, until the first real value is found. This procedure is simpler than that with the primary rays because it must only ascertain whether it crosses spheres or not, without calculating the coordinates. If the ray crosses some sphere, this light source is shaded by another sphere and makes no contribution into lighting. Otherwise, this pixel of the sphere is lighted by this light source, and we need to calculate its luminance, for example, with the Fong model. The calculated illumination adds up with the overall illumination of this pixel.  Fong luminance model Finally, the program records the obtained color into the frame buffer, and then repeats the ray tracing procedure for the next pixel. For geometrical calculations Renderer uses single-precision real numbers (float), and processes color (texturing/lighting) with MMX extensions. Since single precision is sufficient for geometrical calculations the code can be optimized with SIMD extensions working with vectors of numbers of such type. The current CPU RightMark version features 5 Renderer versions. The first two use the standard x87 FPU and MMX extensions, as well as the addition to this set - MMX Extensions, which were for the first time available in Intel Pentium III (as a part of SSE) and early versions of AMD Athlon. The third version uses AMD Extended 3DNow! and Extended MMX extensions and, therefore, it can be used for comparing performance of the FPU and 3DNow! code on the first AMD Athlon models which do not support the SSE extensions. Finally, the last two Renderer modules use Intel SSE and SSE3 extensions and can serve an example of a fine manual code optimization. Thus, it realizes parallel processing of 4 scenes with calculation of shadowing correlations in prerendering and with searching where primary and secondary rays cross spheres at the rendering stage. In the last case and additional speed gain is obtained at the expense of intensive utilization of horizontal addition instruction (HADDPS) which effectively calculates innerproduct of vectors which are many in number in the ray tracing procedure. Finally, the ray tracing method allows for parallel calculations for pixels, even for the average one. But to get higher efficiency and avoid conflicts when different processors address the same memory area (in case of SMP systems) it's better to divide the screen into several parts and provide every processor (a physical or a logical one in HT systems) with its own part:  Multi-thread rendering Such method tremendously increases the speed: the gain is almost proportional to the number of processors in SMP systems and makes up to 40% in the systems with Hyper-Threading support. CPU Performance Test SettingsThe CPU performance test has a lot of user settings which can vary in a very wide range. Below is the list of settings and descriptions for some of them. Renderer Setup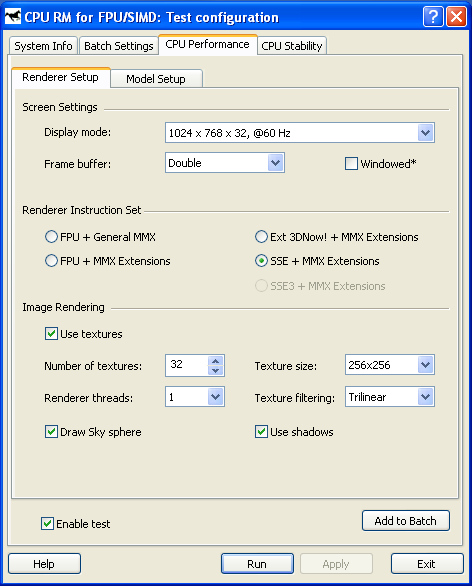 Screen Settings:
Renderer Instruction Set:
Image Rendering:
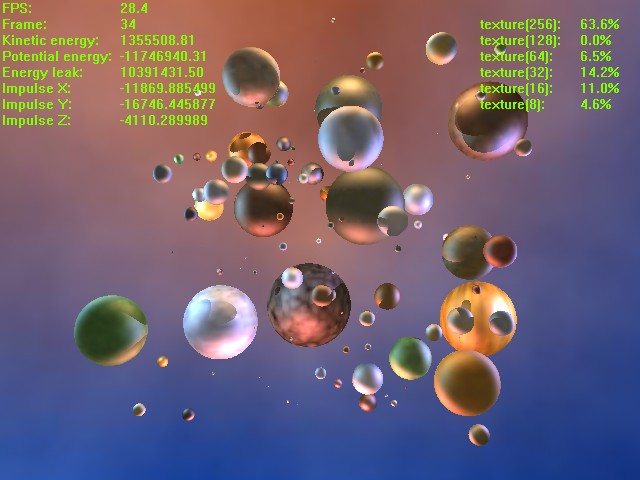 Distribution of textures according to their size
Solver (Model Setup)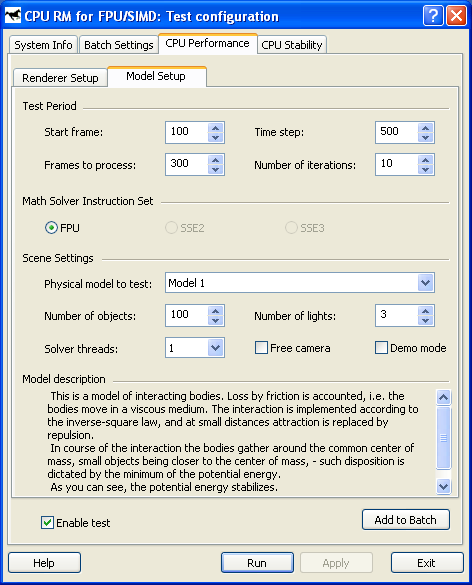 Test Period:
Math Solver Instruction Set :
Scene Settings:
Model 1 Model 2 Model 3 Model 4 Model 5 Model 6 Model 7 Besides, there are some extra demo mode settings located in the system register in HKEY_CURRENT_USER\Software\RightMark\RMCPU\Demo: // statistics display (0 = off, 1 = on) // periodic model randomization (0 = off, 1 = on) // model randomization interval (number of frames) // camera animation mode (0 = off, 1 = on) // camera animation direction (0 = counterclockwise, 1 = clockwise)
// camera animation speed (1 - 10) The following system performance parameters are the final result of the first test: Math Solving FPS - speed of computing the physics of a system
of objects.
CPU Stability TestThe second test of the CPU RightMark is intended for long testing of stability of the loaded CPU. The test uses the same task of numerical modeling executed by Solver. The measurement results are represented as a dependence of CPU performance on time. In particular, this test allows us to define the moment when the CPU clock falls down (throttling) when its temperature exceeds the limits, provided that the processors supports the Thermal Monitor temperature. CPU Stability settingsThese settings are very similar to the Solver settings in the first test, except some specific parameters. 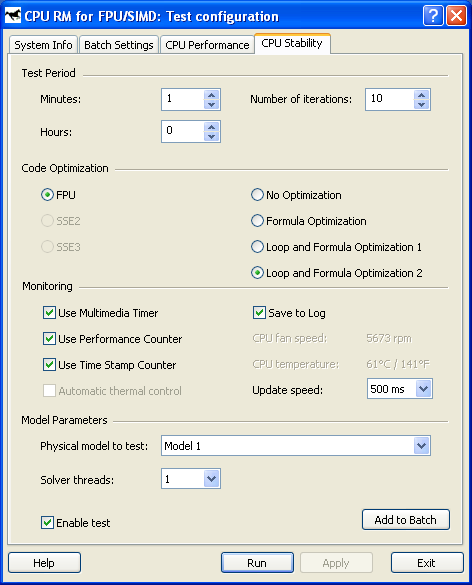 Test Period (Minutes, Hours), Solver parameters (Number of iterations). Code Optimization - CPU extensions used (FPU, SSE2, SSE3), and the version of optimization of the interaction estimation:
Monitoring - performance measurement mode:
Model Parameters - a model and the number of threads of Solver.
Dmitry Besedin (dmitri_b@ixbt.com)
Write a comment below. No registration needed!
|
Platform · Video · Multimedia · Mobile · Other || About us & Privacy policy · Twitter · Facebook Copyright © Byrds Research & Publishing, Ltd., 1997–2011. All rights reserved. |