| « | » |
At first let's note one important moment – all game tests use the same engine. That is you shouldn't expect considerable optimization for this or that game type. It's rather a generalized process of scene rendering, which is based on several illumination and shadow calculation models and which uses the same source HLSL shaders compiled for a selected profile. The engine itself can be considered state-of-the-art – it uses cube maps to calculate illumination from light sources, the cube edge being 512 points, high detail perspective shadow maps (2048x2048, floating format, 32-bit precision), if supported by hardware – DST (Depth Stencil Test – depth maps to render shadows) in D24X8 format, also 2048x2048. Texture compression is widely used. Textures, normal maps and transparency maps are compressed by different methods. All these methods are DXT of one or another version – 3Dc from ATI is not yet supported.
In DEMO mode rendered frames in all scenes are post processed to get such cinematographic effects as depth of field, glow, and such. But post processing is disabled when the tests are run. Now let's proceed to tests.
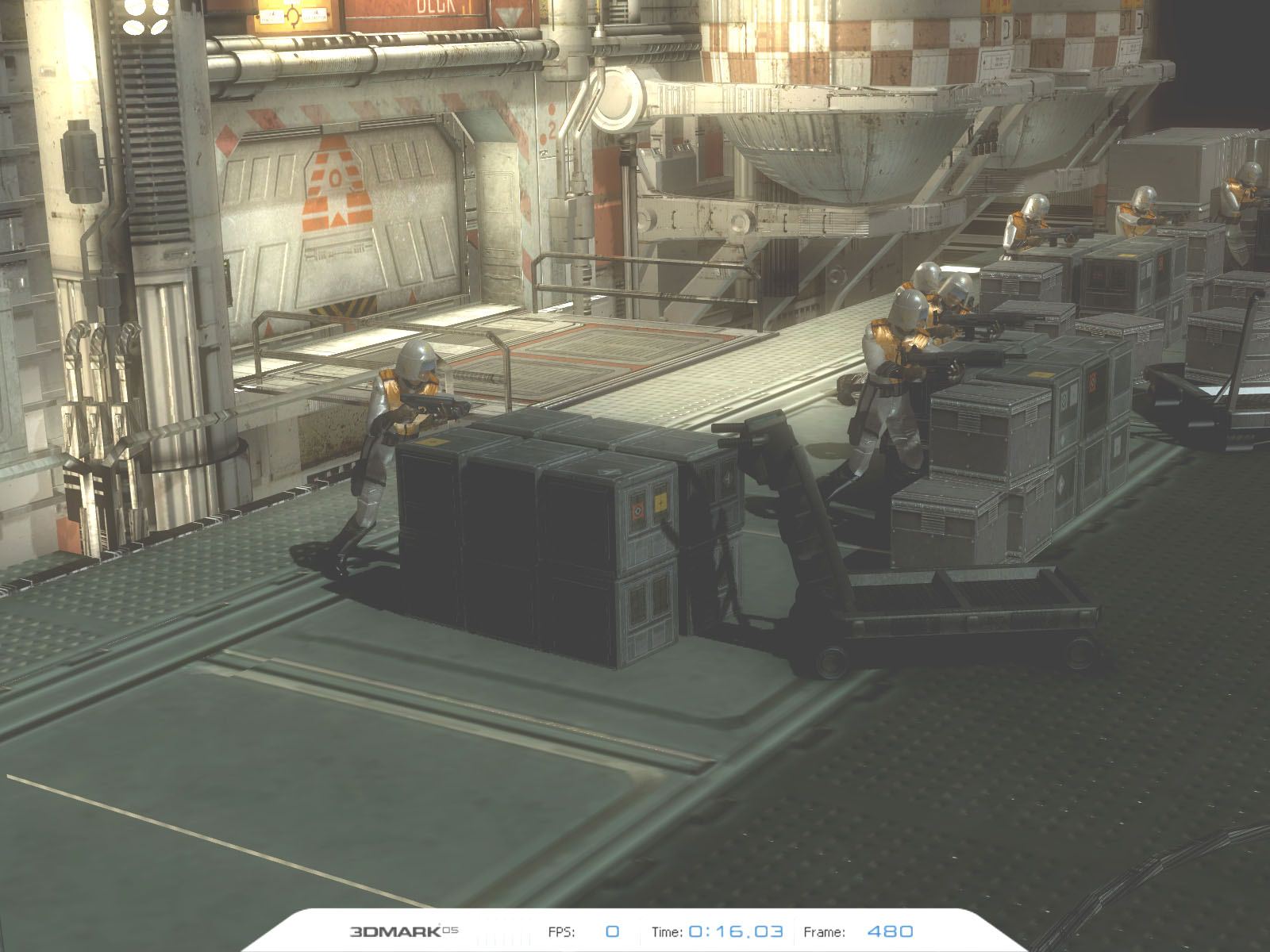
The scene balance in the first test is adequate to modern FPS in many respects. Indoor fights, local dynamic light, maximum calculations are carried out by the accelerator, minimum – by CPU. Somewhat simplified illumination calculations. Metal surfaces with normal and reflection maps. Number of light sources – 8, two of them are complex, directional, the others are point lights.
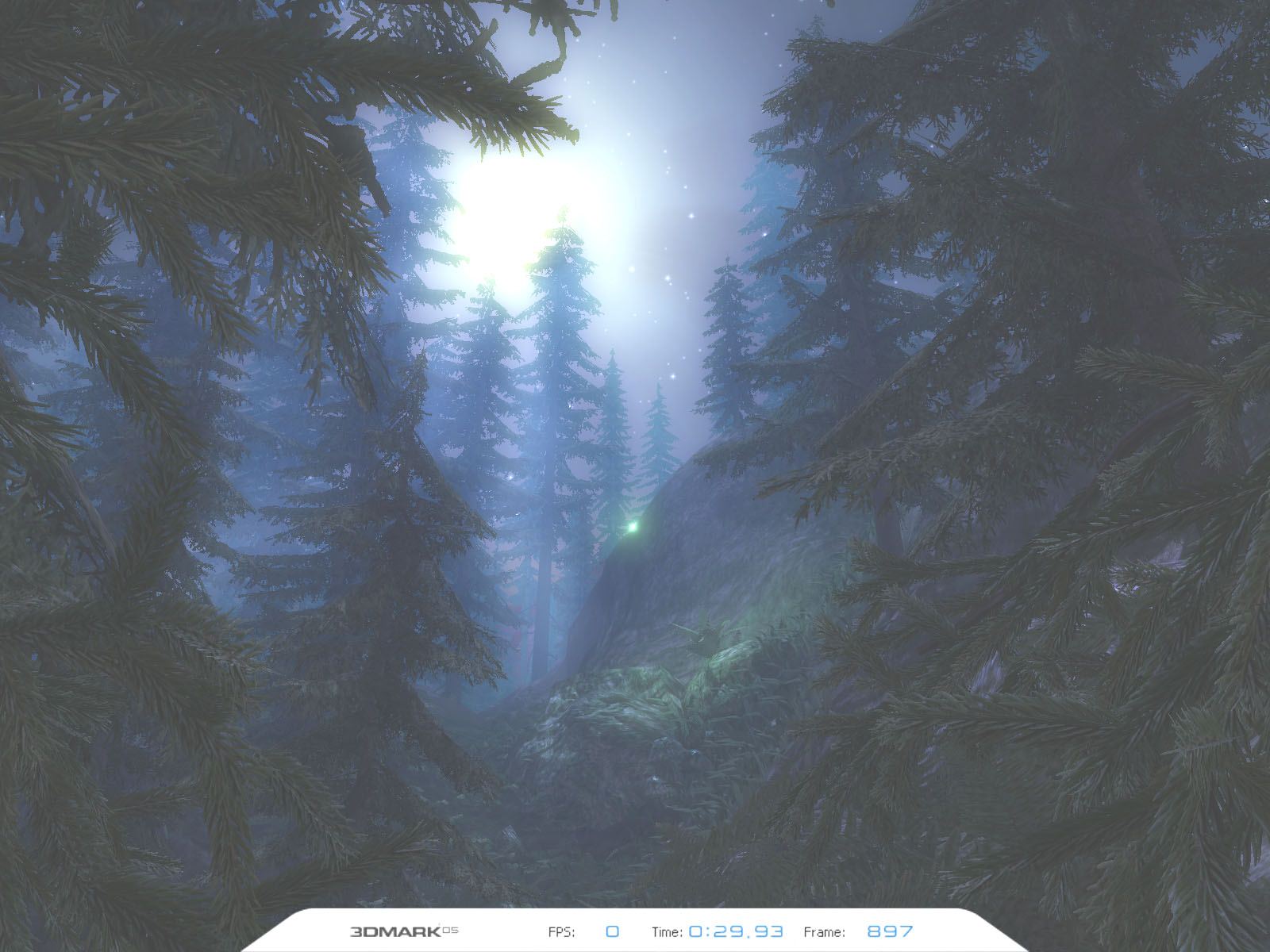
Night forest, lots of vegetation, flying firefly that illuminates leaves of numerous plants. A lot of object physics modelling – flight, waving of the leaves. One directional light – the moon. The firefly is a point light source. This test uses the technology of perspective shadow maps, which can improve the quality of shadows obtained with the help of bitmaps, in case the surface is located far from the object casting shadows on it – traditionally weak point of shadow maps. This technology provides noticeably better quality on such open scenes. The test uses normal maps, maps for diffuse lighting, with detailed textures, procedural light scattering calculations for the sky. On the whole this test is much heavier for CPU.

A flight along a canyon. Vast open space, a lot of ground and sky, which is rather difficult from the point of view of pixel shaders. Actually, the balance of this test is close to a (high image quality) flight simulator. The water surface is rendered with reflection/refraction maps, it reflects all the surroundings. Moreover, fresnel coefficients for water are rather intensively calculated pixel-by-pixel. There is only one light source, the sun. It lights the vast open area casting shadows everywhere. This is an intensive test with its fill rates and pixel shader calculations.
Formula to calculate the final result:
Final result = (GT1fps * GT2fps * GT3fps)^(1/3) * 250
This formula runs that all the tests are equally "valuable" and tries to smooth over the breakaway of powerful accelerators from average solutions (it's all right, the difference between 100 and 200 fps is not that important in real applications as the difference between 30 and 60, which is stressed by the formula).
| « | » |