|
||
|
||
| ||
|
||
|
||
| ||
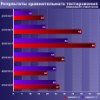
Some history.As it often happens with high-tech projects, the system GPS (Global Positioning System) was developed by the military. The project of satellite network for determination of position in real time mode in any point of the globe was named Navstar (Navigation system with timing and ranging). GPS abbreviation appeared a little later, when the system was used not only for defense but also with civilian target. First steps of this system development were made in the mid 70 s; commercial exploitation started only in 1995. Currently we have 28 satellites evenly distributed on the orbits at a height of 20350 km (for semifunctional work 24 satellites are sufficient). Running a few steps forward I should mention that the decision of the President of the USA on cancellation of SA mode from May 1 2000 was a key moment in GPS development (SA - selective availability - is an uncertainty which is artificially brought in satellite signals for inaccurate work of civil GPS-receivers. From that data an amateur terminal can define the coordinates accurate within several meters (earlier it was several tens of meters)! On the fig.1 you can see the errors in navigation before and after disabling of SA mode (U.S. Space Command data).  Fig.1 OK, let's try to determine how the GPS is made, and then turn to some user aspects. First in our consideration goes a principle of range calculation what makes a base of the work of the space navigation system. Algorithm of distance measuring from a point of observation to a satellite.Distance measurement is equal to the time delay of signal traveling from the satellite to the receiver multiplied by light speed. Each satellite of the GPS generates continuously radiowaves of two frequencies: L1=1575.42 MHz and L2=1227.60 MHz. The transmitter's power constitutes 50 and 8 W correspondingly. The navigation signal represents PRN (Pseudo Random Number code). PRN can be of two kinds: the first one, C/A-code (Coarse Acquisition code) is used for civil receivers, the other P-code (Precision code) is used in military purposes and sometimes for geodesy and cartography problems. L1 frequency is modulated both with C/A and P-code; L2 frequency is intended only for P-code transmission. Beside the mentioned, there is Y-code which is in fact the encoded P-code (in wartime the code system can change). The repetition period is quite huge (i.e. for P-code it equals 267 days). Each GPS-receiver has its own generator which works at the same frequency and modulates the signal according to the same law as the satellite's generator does. So, knowing the delay time between the identical parts of the code which was received from the satellite and generated independently you can calculate the time of traveling of the signal and consequently the distance to the satellite. One of the serious technical problems is synchronization of watches on the satellite and in the receiver. Even the slightest error can cause an enormous fault in distance calculation. Each satellite carries a high-precision atomic clock. Of cause it's impossible to install it in each receiver. That's why there used some data redundancy (a bit later we will talk about it in depth). Beside the navigation signals the satellite transfers service information (ephemerides (precision data on the satellite's orbit), the forecast for the delay while signal traveling in the ionosphere (the light speed changes when passing different atmosphere layers), data on satellite's efficiency (so called "almanac" which contains the data renewed in every 12.5 minutes on the status and orbits of all satellites). These data are transferred at 50 bit/s at L1 or L2 frequency. General principles of determination of position with GPS.The basic idea of determination of position of GPS-receiver is calculating of the distance from it to several satellites, the position of those is considered to be known (these data are kept in the almanac received from the satellite). In geodesy such calculating method is called trilateration.  Fig.2 If we know the distance A we can't determine receiver's position (it can be in any point on the sphere of the radius A, circumscribed around the satellite). If we know the distance to the second satellite, we can only state that the object is located on the blue circumference. The distance C reduces the uncertainty to two points (thick blue points on the figure). It's already enough for determining of the position - one of the points lies on the Earth's surface and the other (false) is either deeply in the earth or high in the sky. But in our real life it's not so simple. The described method works perfectly with precise values. There is always some inaccuracy of measurements caused by inaccurate synchronization of watches, dependence of light speed on the atmosphere conditions etc.). That's why there used not three but at least four satellites. On receiving a signal from 4 or more satellites, the receiver starts to calculate a point of intersection of the corresponding spheres. If a point lacks, the receiver's processor corrects its clock by the method of successive approximations until it gets the required point. We should notice that imperfection in calculation can be also caused by the error in position value of the satellites. For control of orbits and position of the satellites there are 4 ground-based tracker stations, communications systems and the control center which are under control of Department of Defense of the USA. The tracker stations don't stop keeping a look-out on all the satellites in the system and they transfer the data on their orbits to the control center, where they calculate the refined data of the trajectory and corrections for satellite clocks. These data are written in the almanac and transmitted to the satellites, and the latter ones transfer them to the receivers. Beside the mentioned, there are a lot of other systems which increase the precision of calculation, i.e. special schemes of signal processing decrease errors caused by interference of the direct satellite signal with a reflected one. When the SA mode was abolished, the position of civil receivers can be defined within 3-5 meters (the altitude is determined within 10 meters). These data can be obtained with 6-8 satellites (though many modern devices have 12-channel receiver, that is it can get the signal from 12 satellites simultaneously). DGPS mode (Differential GPS) allows to reduce the error down to several centimeters. It requires two receivers - the first one is located in the point with definite coordinates and is known as "base", and the other is called mobile. The data from the base receiver are used for correction the information obtained by the mobile one. The correction can be carried out both in real time mode and in off-line data processing mode. As a base one they usually use a professional receiver of a company which specializes in navigation or geodesy. Beside the ground base receivers for differential correction of GPS-data you can use a satellite system of differential service from OmniStar company. The data for correction are transferred from geostationary satellites of the company. We should notice that the main customers of differential correction are geodesic and topographic surveys - for private use DGPS makes no interest because of high price (i.e. with OmniStar it will cost you more than $1500 a year) and large in size equipment. Short notes of a GPS userWhen I first got know about such devices which were like a mobile phone in size (it was around 1997) they shocked me by their price - $400! But in August 1998 I happened to be in Boston where I saw such navigators from $99 to $250. After long pondering I decided to buy the most advanced and the most expensive model - Garmin GPS II+, together with it I purchased a special case for it and A cable. In that shop I noticed also two more accessories: the device for mounting a navigator on a bike handle bar and a cable for connecting to a PC (a bit more than $30). The latter serves only for transmitting a route to the PC. Unfortunately, there is no possibility to load maps in the device.  Those who want to look at technical characteristics of this device can do it here. I won't give the specs since it has already been taken out of production. The only I'd like to mention is that the weight was 255 g and the size was 59X127X41 mm. Thanks to its triangle section, the device stands quite steady on a table or on a dash fascia (for better fixation there is a Velcro sticker). The power is supplied by 4 batteries of AA type (they work 24 hours) or an external source. Now I want to share with you the main possibilities of my navigator, and I think that most of the devices available on the market feature similar specs.  At first sight GPS II+ resembles a mobile phone produced several years ago. But then you notice a thick antenna, a huge display (56X38 mm!) and small number of keys. When you switch the device on, there starts a process of gathering of information from the satellites, and on a display you can see a simple animation (the rotated globe). After initialization (which takes a couple of minutes in the open) the screen displays a primitive sky's map with the numbers of the visible satellites, and next to it there appears a histogram that shows a signal level from each satellite. Besides, there you cab read an error (in meters). The interface is based on a principle of listed pages (PAGE button). Beside the "satellite page" mentioned above there are "navigation page", "map", "page back", "menu page" and some others. On the navigation page you can see the following: absolute geographical coordinates, the traversed path, instantaneous and average speed, altitude from a see level, traveling time and an electronic compass. I must say that an altitude is determined with much bigger error than two horizontal coordinates. But the instantaneous speed is calculated with very high precision (especially for high-speed objects). Besides, you can use it as a speedometer in your car (it can measure both in km and in miles) - it will help you save your money:) The traversed path is marked on the "map" (the memory is enough for about 800 km). The scale can be changed from tens of meters to hundreds of kilometers. The most fascinating thing is that the memory contains main cities of the world! On the USA it keeps the most detailed information (i.e. all districts of Boston are displayed with their own names). Imagine that you need to get to Washigton. So, you look for this city in the memory, click on the "GO TO" button, and on the display you will see a local direction of your traveling, a global route to Washington; the number of kilometers (straight, of cause) from you to the destination, average speed and calculated time of arrival. Another important function is a return one. The memory can keep up to 500 waypoints. Each point can be named as you like, besides there are different pictograms for displaying the information. Switching the function of return to a point you will see the same information as we described in case of Washington. Beside the straight route, Garmin offers the function TrackBack, of cause it's much more convenient if you are in town. The curve is represented by approximate straight sections with marks in the breaks. When you have passed one straight section, the navigator will switch to the other nearest mark. Attention! If you are in the building, you have to look for the open place. The navigator offers a lot of other interesting possibilities, and I just can't describe all of them here. Imagine only that you can use the device both in horizontal (i.e. in the car) and in vertical position (on the go) (see fig.3). The main feature of GPS that won my heart is lack of any payment for usage of this system! ConclusionI don't think you want me to enumerate all range
of application of the GPS system. GPS-receivers can be mounted inside
the cars, in the mobile phones and even inside your watch! Not long
ago I came across a note where they wrote about new miniature chip
which combined a GPS-receiver and GSM module, - they suggested installing
it inside dog collars so you might find your pets via cellular radio!
Write a comment below. No registration needed!
|
Platform · Video · Multimedia · Mobile · Other || About us & Privacy policy · Twitter · Facebook Copyright © Byrds Research & Publishing, Ltd., 1997–2011. All rights reserved. |